- Go 75.9%
- JavaScript 18.9%
- Rust 2.9%
- Python 1.3%
- Makefile 0.4%
- Other 0.5%
* feat(config): make max image upload size configurable Let max image upload size be set from config or environment instead of a fixed 10 MB cap. The upload handler still falls back to 10 MB when MaxImageUploadSize is not set. Signed-off-by: M8te <38794725+m8tec@users.noreply.github.com> * feat(config): support human-readable MaxImageUploadSize values Max image upload size can now be configured as a readable string like 10MB or 1GB instead of raw bytes. The config load validates it at startup, and the upload handler parses it before applying request limits (10MB fallback if it fails). + MaxImageUploadSize as human-readable string + removed redundant max(1, ...) to address code review + cap memory usage of ParseMultipartForm to 10MB (address code review) Signed-off-by: M8te <38794725+m8tec@users.noreply.github.com> * refactor(config): consolidate MaxImageUploadSize default and add tests Move the "10MB" default constant to consts.DefaultMaxImageUploadSize so both the viper default and the runtime fallback share a single source of truth. Improve the validator error message with fmt.Errorf wrapping to match the project convention (e.g. validatePurgeMissingOption). Add unit tests for validateMaxImageUploadSize (valid/invalid inputs) and maxImageUploadSize (configured, empty, invalid, raw bytes). Compute maxImageSize once at handler creation rather than per request. --------- Signed-off-by: M8te <38794725+m8tec@users.noreply.github.com> Co-authored-by: Deluan Quintão <deluan@navidrome.org> |
||
|---|---|---|
| .devcontainer | ||
| .github | ||
| adapters | ||
| cmd | ||
| conf | ||
| consts | ||
| contrib | ||
| core | ||
| db | ||
| git | ||
| log | ||
| model | ||
| persistence | ||
| plugins | ||
| release | ||
| resources | ||
| scanner | ||
| scheduler | ||
| scripts | ||
| server | ||
| tests | ||
| ui | ||
| utils | ||
| .dockerignore | ||
| .git-blame-ignore-revs | ||
| .gitignore | ||
| .golangci.yml | ||
| .nvmrc | ||
| CODE_OF_CONDUCT.md | ||
| CONTRIBUTING.md | ||
| Dockerfile | ||
| go.mod | ||
| go.sum | ||
| LICENSE | ||
| main.go | ||
| Makefile | ||
| Procfile.dev | ||
| README.md | ||
| reflex.conf | ||
![]()
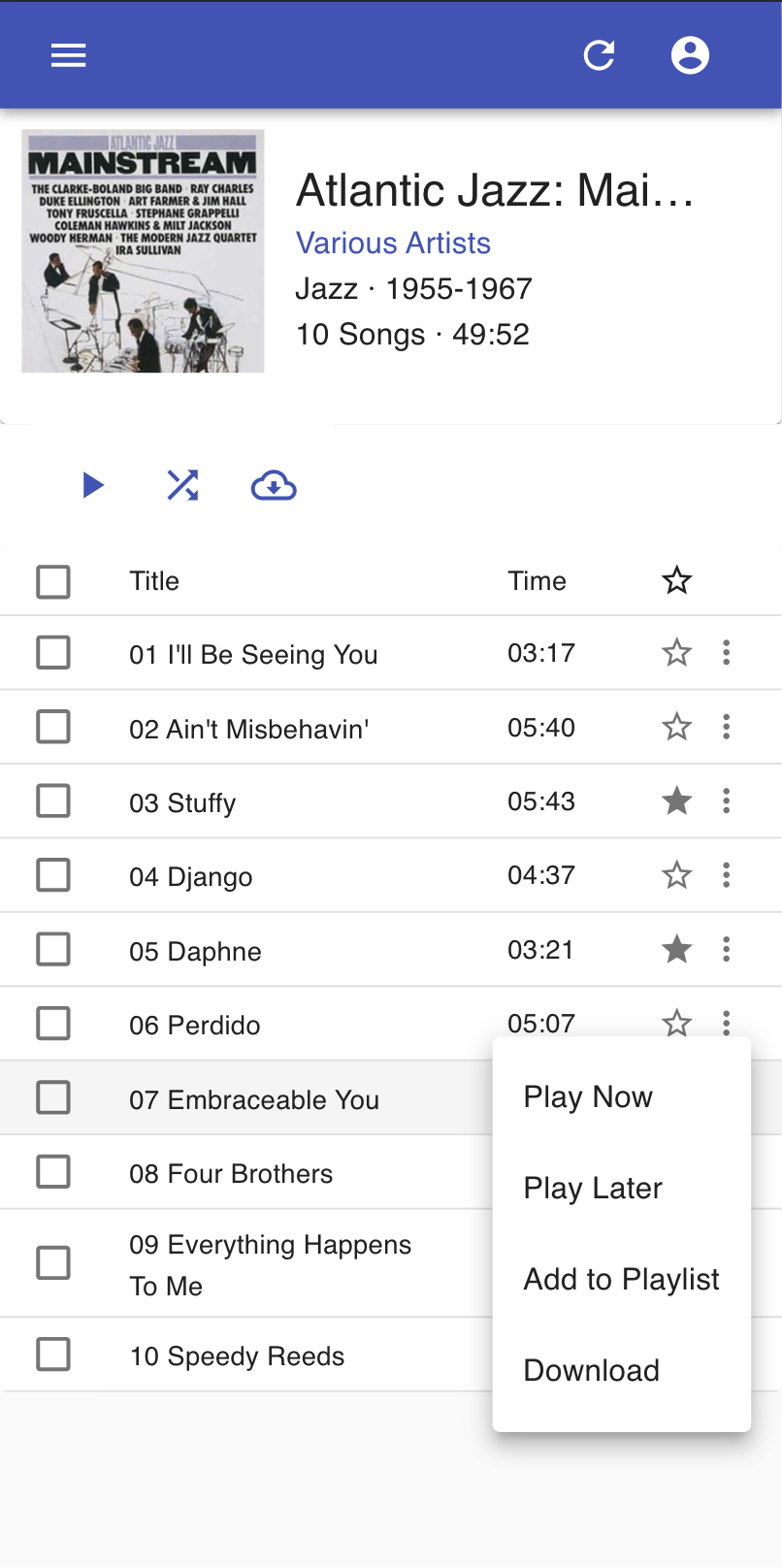
Navidrome Music Server 






![]()
Navidrome is an open source web-based music collection server and streamer. It gives you freedom to listen to your music collection from any browser or mobile device. It's like your personal Spotify!
Note: The master branch may be in an unstable or even broken state during development.
Please use releases instead of
the master branch in order to get a stable set of binaries.
Check out our Live Demo!
Any feedback is welcome! If you need/want a new feature, find a bug or think of any way to improve Navidrome, please file a GitHub issue or join the discussion in our Subreddit. If you want to contribute to the project in any other way (ui/backend dev, translations, themes), please join the chat in our Discord server.
Installation
See instructions on the project's website
Cloud Hosting
PikaPods has partnered with us to offer you an officially supported, cloud-hosted solution. A share of the revenue helps fund the development of Navidrome at no additional cost for you.

Features
- Handles very large music collections
- Streams virtually any audio format available
- Reads and uses all your beautifully curated metadata
- Great support for compilations (Various Artists albums) and box sets (multi-disc albums)
- Multi-user, each user has their own play counts, playlists, favourites, etc...
- Very low resource usage
- Multi-platform, runs on macOS, Linux and Windows. Docker images are also provided
- Ready to use binaries for all major platforms, including Raspberry Pi
- Automatically monitors your library for changes, importing new files and reloading new metadata
- Themeable, modern and responsive Web interface based on Material UI
- Compatible with all Subsonic/Madsonic/Airsonic clients
- Transcoding on the fly. Can be set per user/player. Opus encoding is supported
- Translated to various languages
Translations
Navidrome uses POEditor for translations, and we are always looking for more contributors
Documentation
All documentation can be found in the project's website: https://www.navidrome.org/docs. Here are some useful direct links:
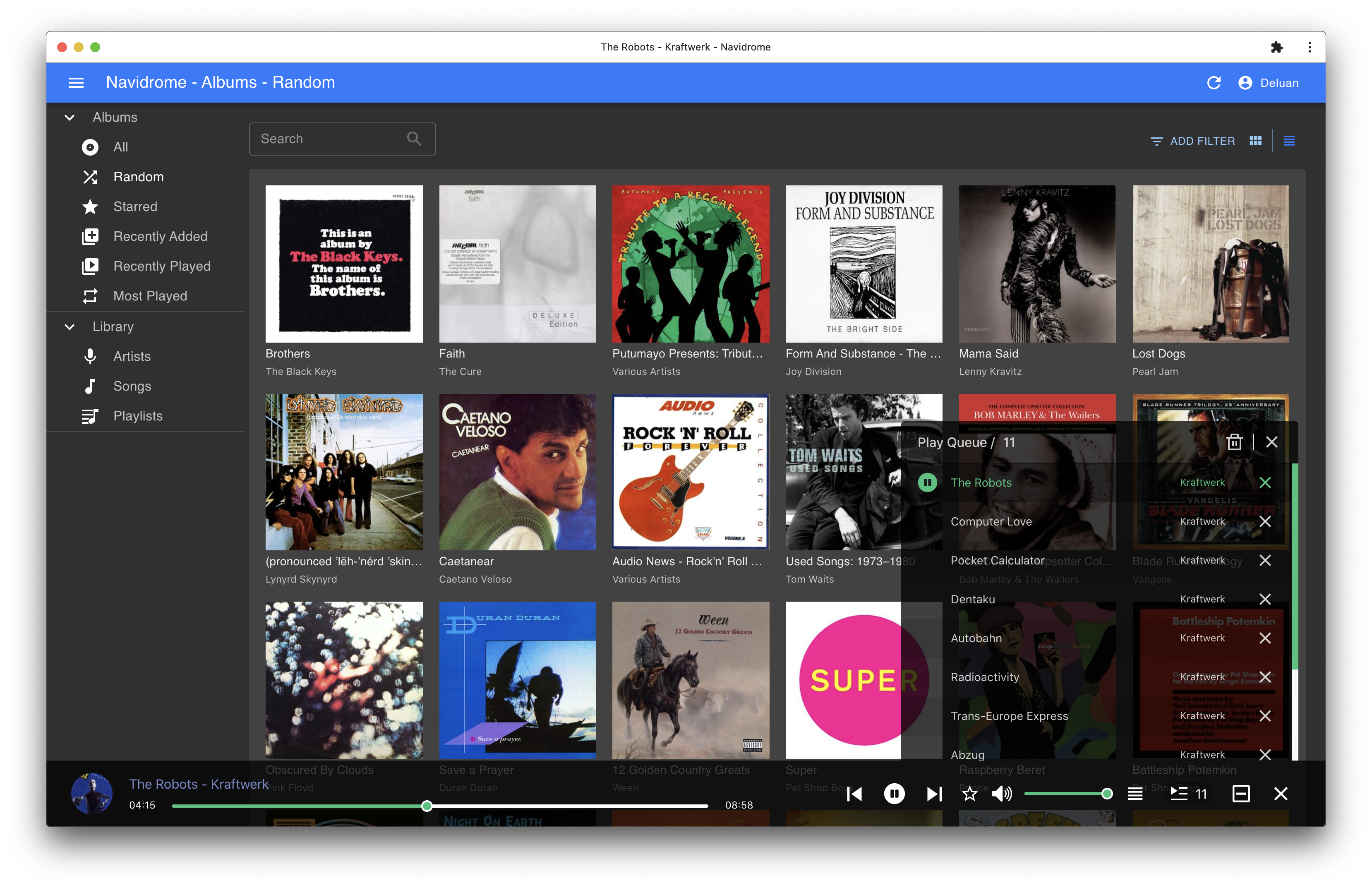
Screenshots